Welcome to the Large-Scale Point Cloud Classification Benchmark!




3D point cloud classification is an important task with applications in robotics, augmented reality and urban planning.
Recent advances in Machine Learning and Computer Vision have proven that complex real-world tasks require large training data sets for classifier training. At the same time, until now there were no data sets for 3D point cloud classification which would be sufficiently rich in both object representations and number of labelled points. For example, the well-known Oakland data set contains less than 2 million labelled points. Another popular data set, the NYU benchmark, provides only indoor scenes. Finally, both Sydney Urban Objects data set and the IQmulus & TerraMobilita Contest use a 3D Velodyne LIDAR mounted on a car which provides much lower point density than a static scanner.
The same counts for the Vaihingen3D airborne benchmark.
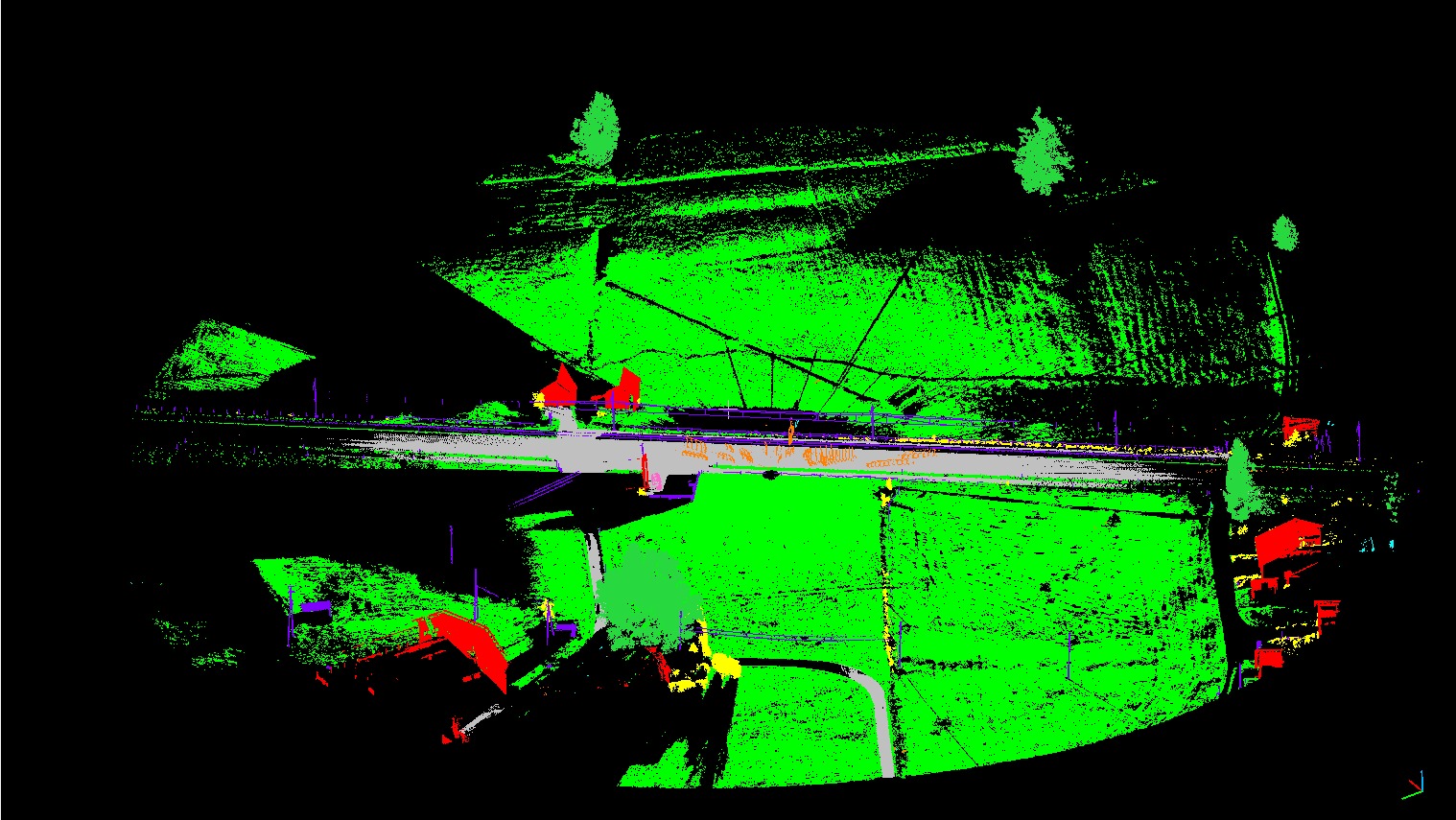
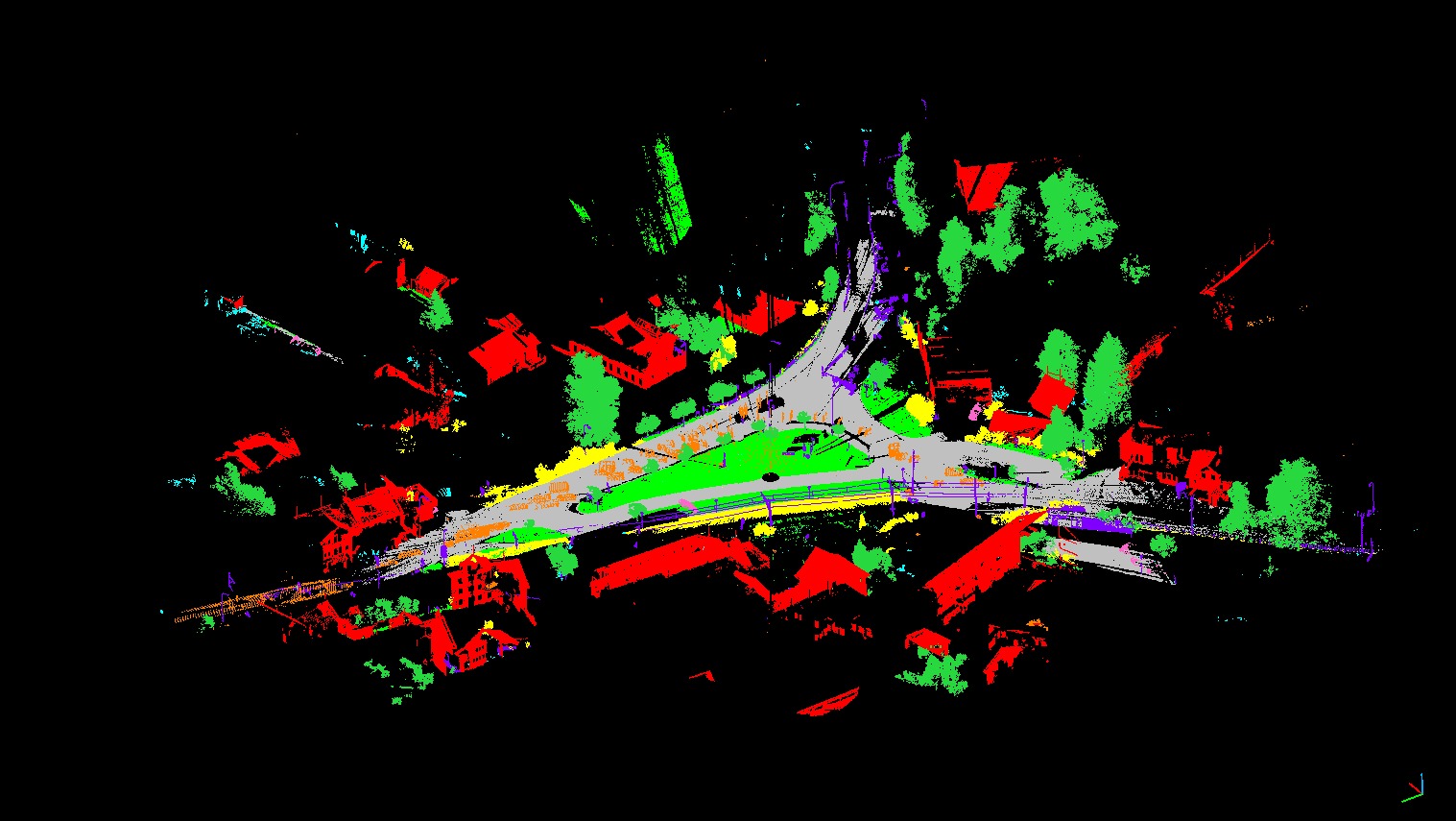
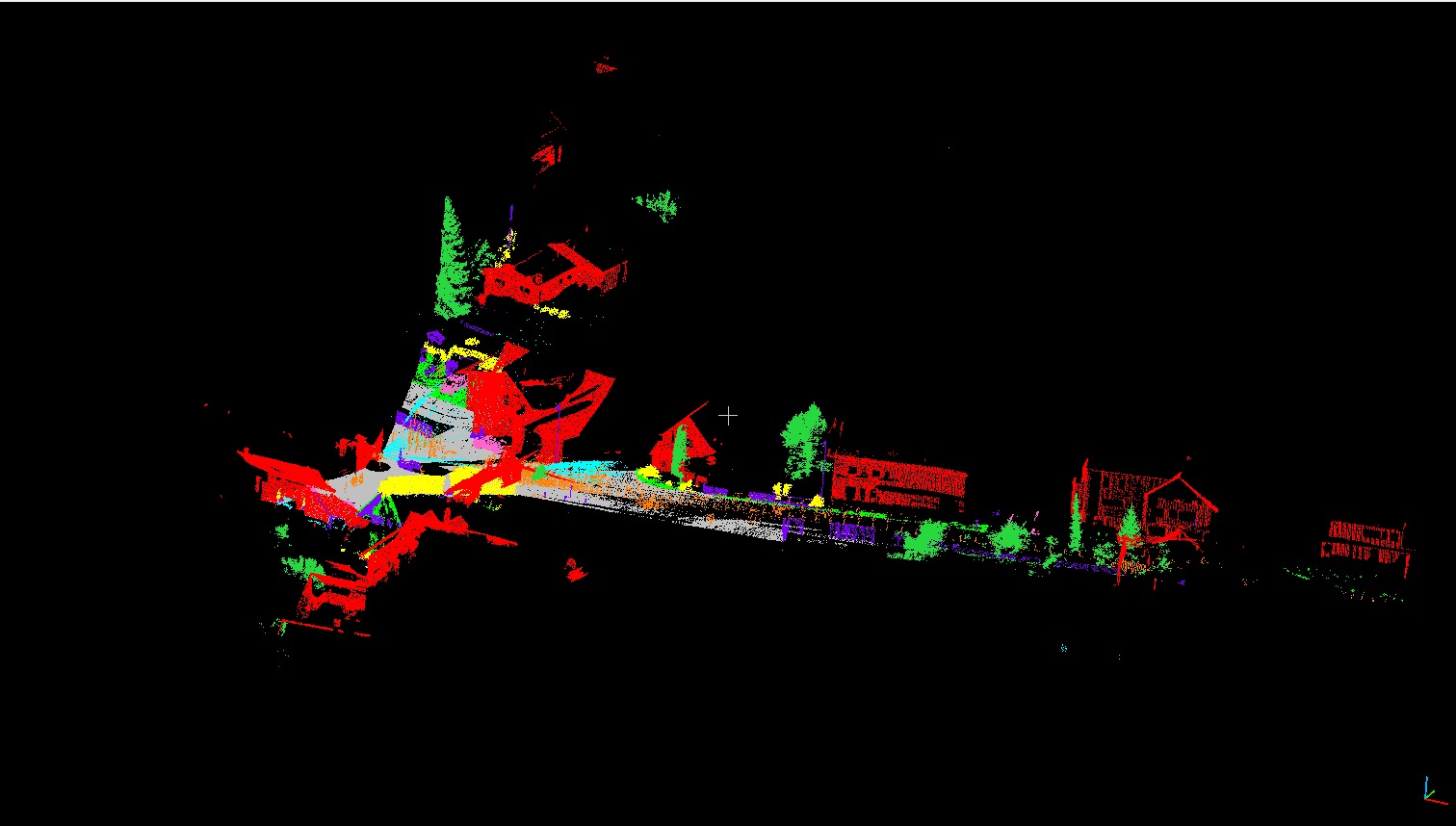
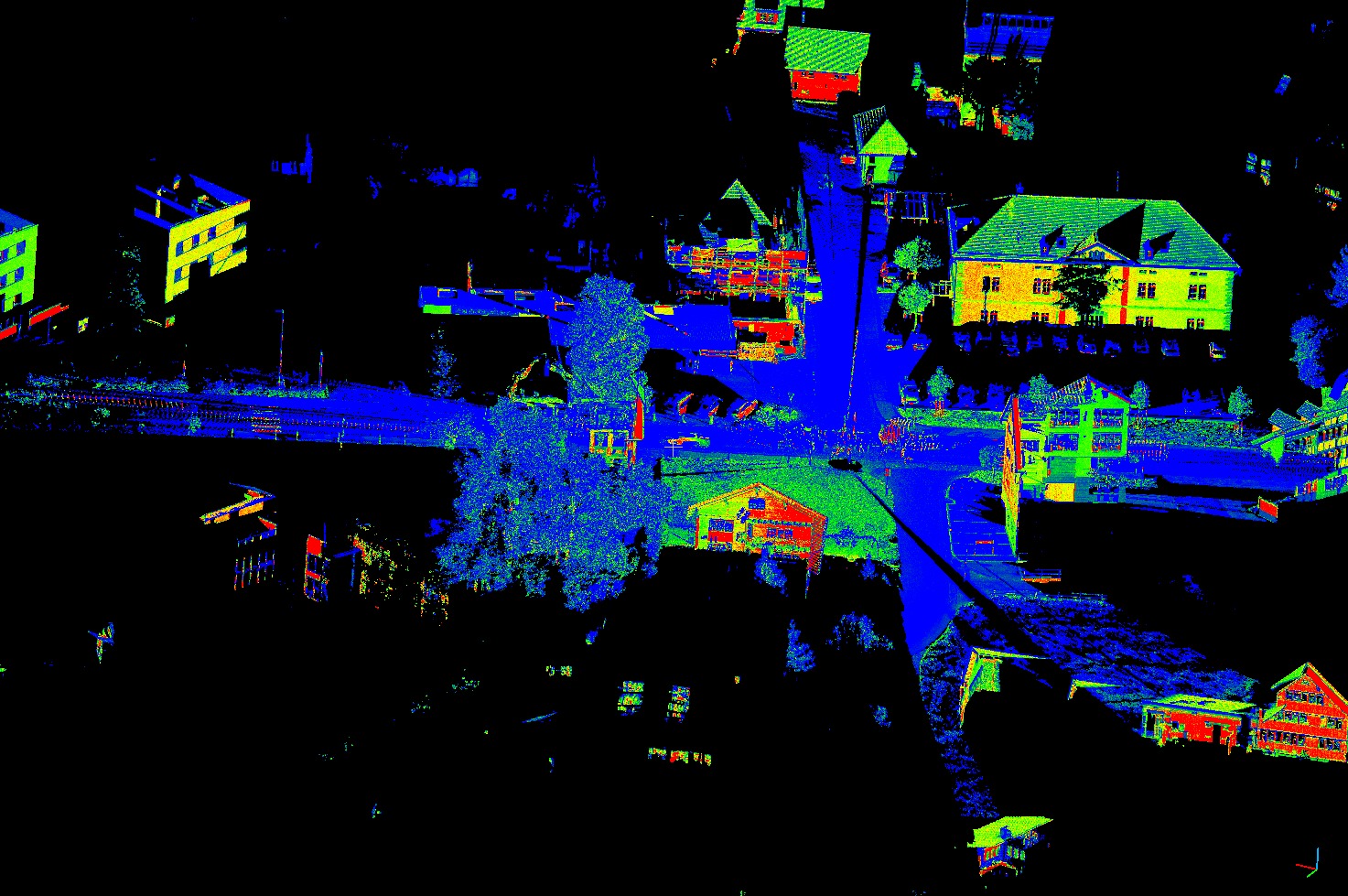
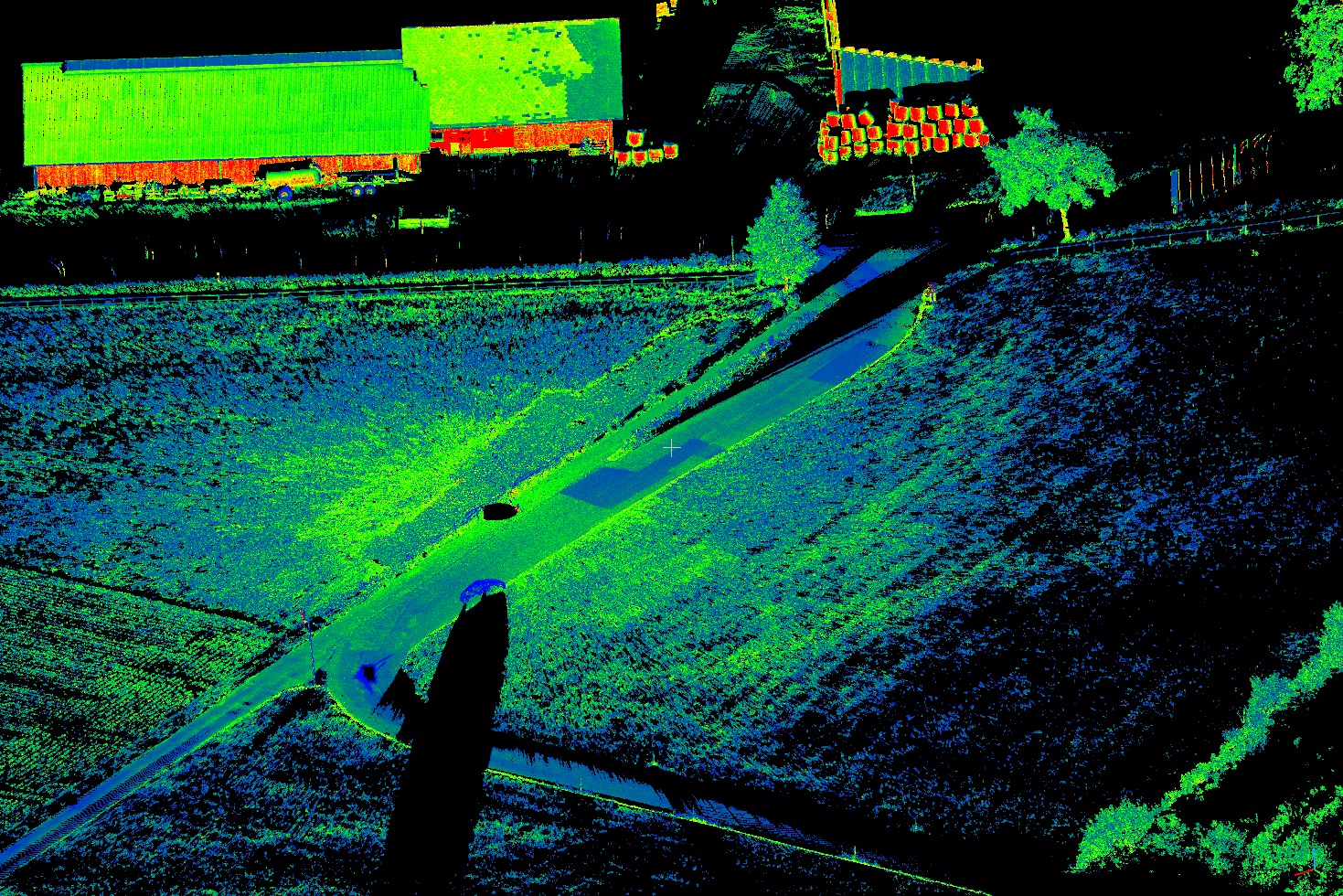
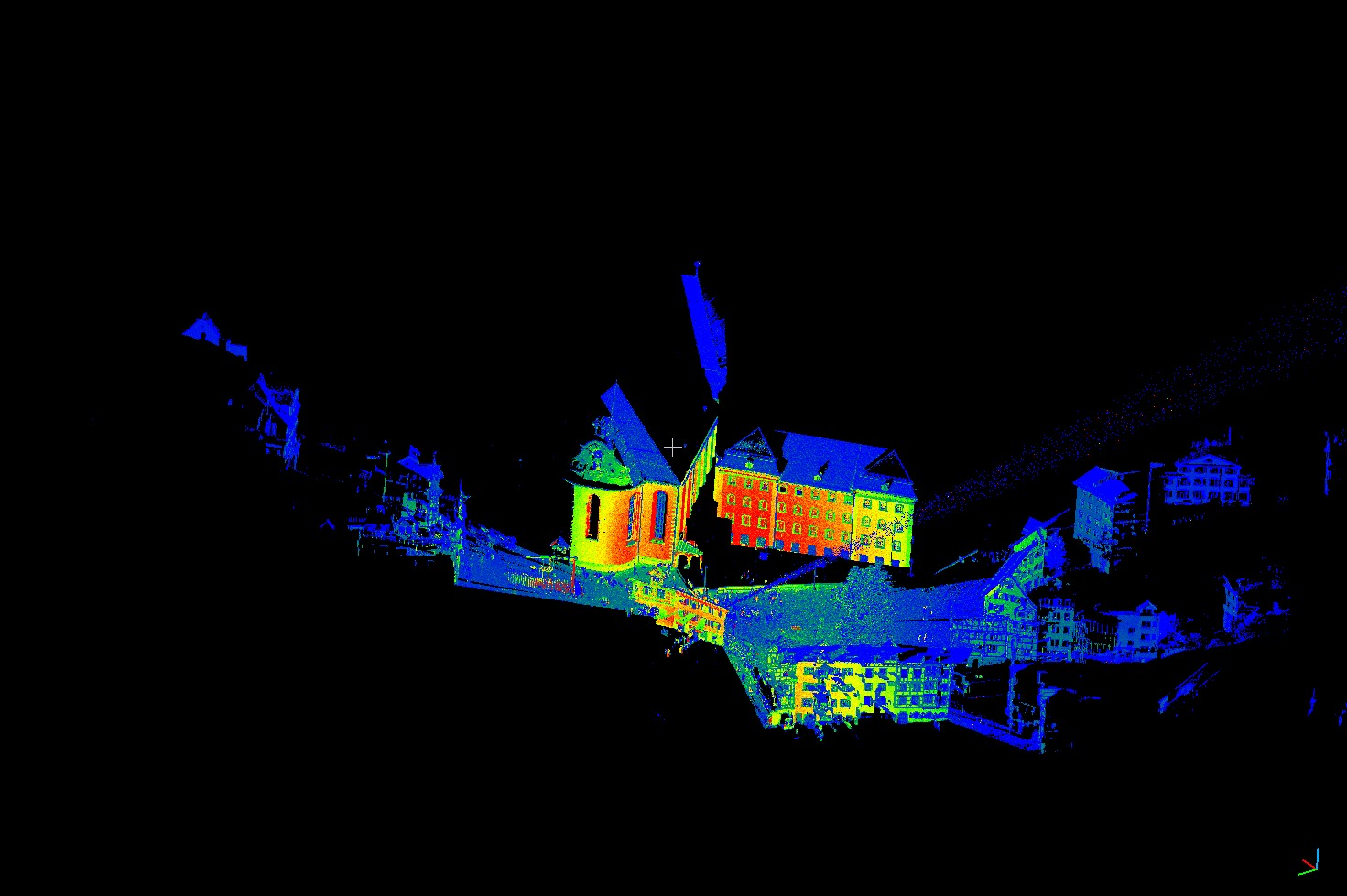
This benchmark closes the gap and provides a large labelled 3D point cloud data set of natural scenes with over 4 billion points in total. It also covers a range of diverse urban scenes: churches, streets, railroad tracks, squares, villages, soccer fields, castles to name just a few. The point clouds we provide are scanned statically with state-of-the-art equipment and contain very fine details. Our goal is to help data-demanding methods like deep neural nets to unleash their full power and to learn richer 3D representations than it was ever possible before.
What do we provide?
We have created a framework for the fair evaluation of semantic classification in 3D space. In this framework we provide:
- A large set of point clouds with over four billion of labelled points.
- Ground truth, hand-labelled by professional assessors.
- A common evaluation tool providing the established intersection-union measure along with the full confusion matrix.
Research Paper
@inproceedings{hackel2017isprs,
title={{SEMANTIC3D.NET: A new large-scale point cloud classification benchmark}},
author={Timo Hackel and N. Savinov and L. Ladicky and Jan D. Wegner and K. Schindler and M. Pollefeys},
booktitle={ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences},
year = {2017},
volume = {IV-1-W1},
pages = {91--98}
}
Change Log
Credits
A special thanks goes to Anton Milan and Laura Leal-Taixé for their great support and for providing the source code of their Multiple Object Tracking Benchmark!
Copyright
The datasets provided on this page are published under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License. This means that you must attribute the work in the manner specified by the authors, you may not use this work for commercial purposes and if you alter, transform, or build upon this work, you may distribute the resulting work only under the same license. If you are interested in commercial usage you can contact us for further options.
Newsletter
Subscribe to our newletter to receive updates and other important information about the benchmark.
Your email will never be used for other purposes. You can unsubscribe at any time.
